Project overview
Every year, students in ME 218B Introduction to Mechatronics build autonomous robots that engage in a game with other robots in the class. Patterned loosely on the table-top game Battleship, the objective of this year's two-player game was for bots to sink opponents' ships by hitting them with Nerf balls. Bots would navigate to a supply depot on their respective sides to load up 5 Nerf balls at a time, then move into position to shoot opponent ships, their power supply, or the opponent bot itself. As soon as the bots ran out of balls, they would return to the home depot to reload before resuming shooting again. The playing field was equipped with a vision system that recognized fiducials carried by the bots and ships to provide information on their location. Game play came to a halt after 2 minutes or if a bot was shot by its opponent. The bot with the most points at the moment the game ended won the match.
Rules on hits and points:
Rules on hits and points:
- Hitting the power station with a ball will prevent the re-supply depot from delivering replacement balls for 10 seconds.
- A direct hit, through the air, on the opposing ‘bot scores 1 point and ends the round. …
- Each ship is worth 1000 points when sunk.
- A hit on the Power Station is worth 100 points.
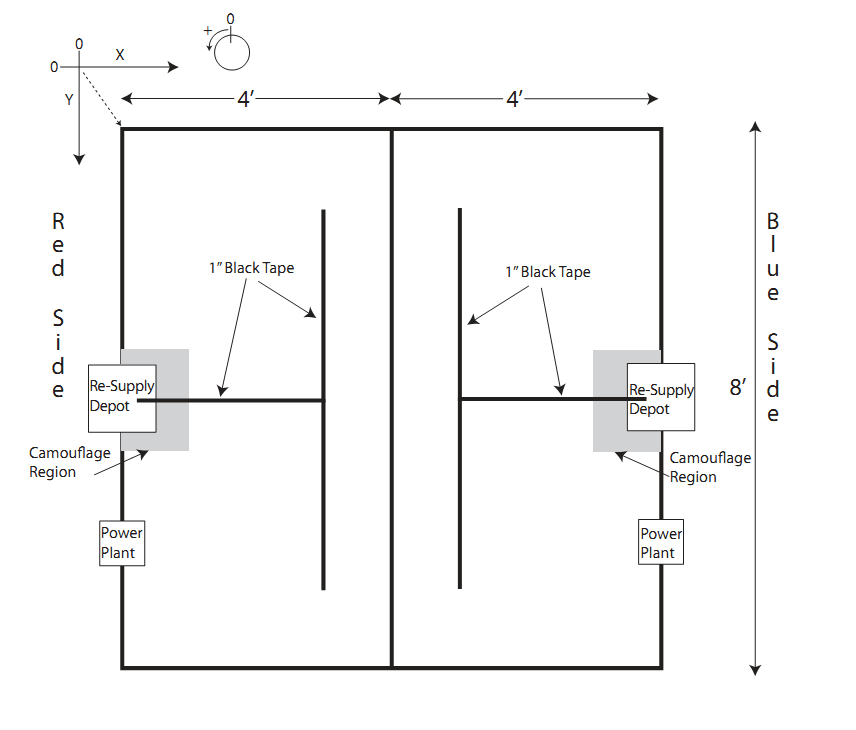
Playing field
The game was set up on a playing field with the following specifications:
Ship Dimensions
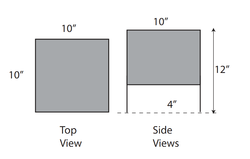
Ships are stationary targets with fiducials perched on top of an upright rod in the center (see picture on left). A ship is considered to be shot down when a Nerf ball lands on the fiducial and topples it, thus eliminating the ship from the battlefield.
|

|
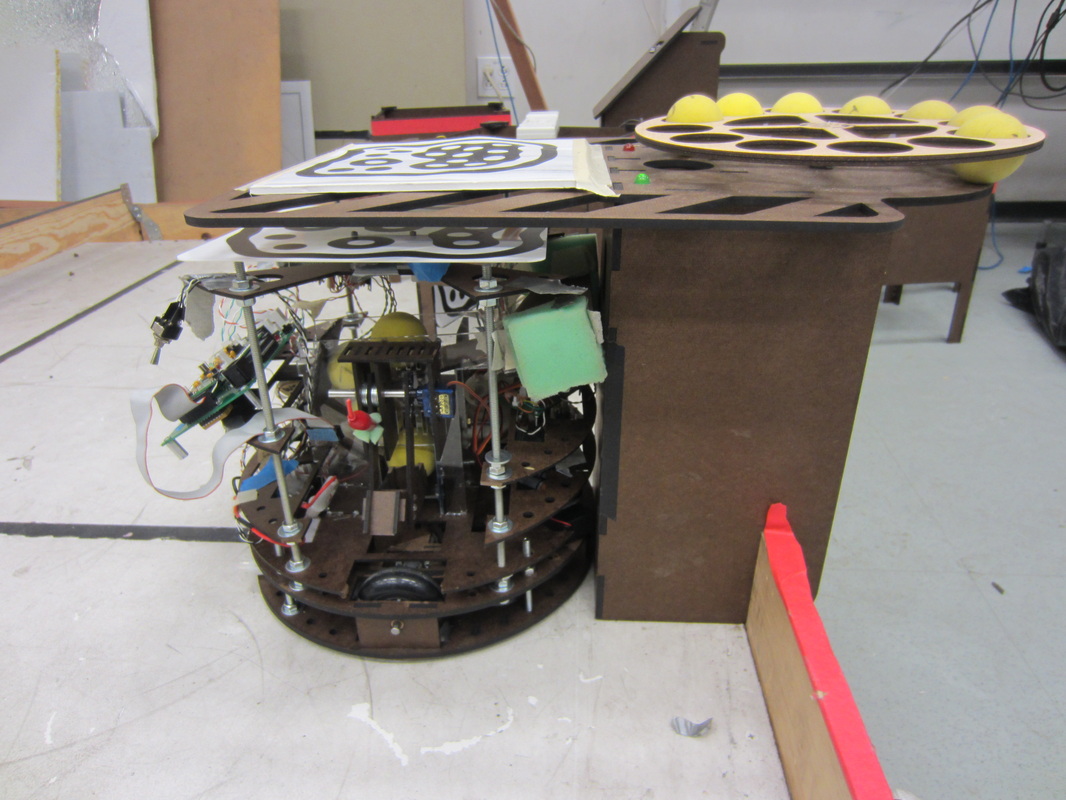
Akula Battlebot
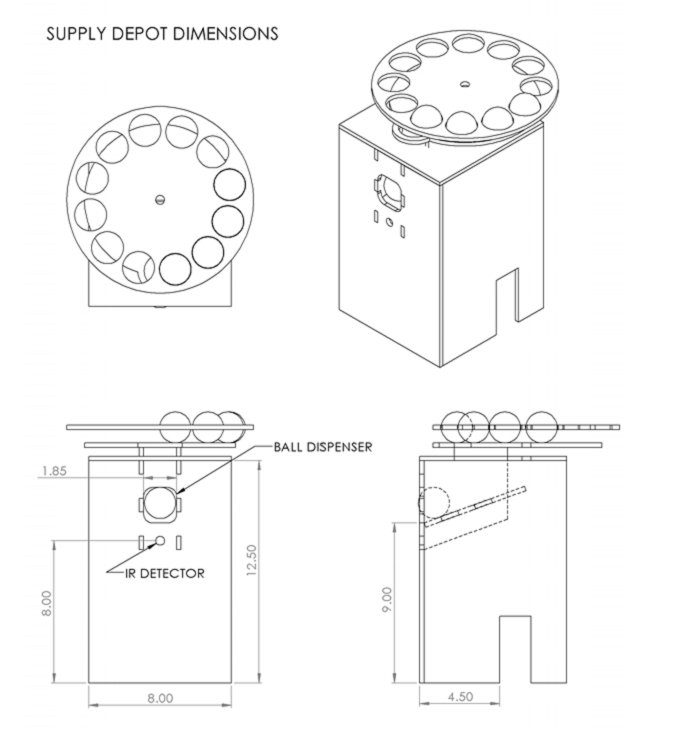
Constructed from lasercut Duron and acrylic, the Akula Battlebot is controlled by an E128 microprocessor and mobilized by two individually driven wheels. It searches for enemy ships using camera vision system and navigates to an ideal shooting position by moving forward, making a 90 degree turn, continuing forward until aligned with the target, then shooting sideways. The Akula is equipped with a flying wheel shooting mechanism that launches balls at a high angle to ensure accuracy. A power station detection system utilizing phototransistors to detect the specific IR frequency of an enemy's power supply allows the Akula to target the enemy power station and launch balls at it to prevent opponents from reloading. Akula's strategy for reloading is to first find a sweet spot along the center line, then back up straight into the supply depot (the vision system does not cover that region). IR emitters are then triggered to signal a request for balls from the supply depot. Five balls from the supply depot are deposited into the bot's ball collector mechanism when the supply depot sensor receives the signal. Upon reloading, the Akula powers straight forward out of the home camouflage region to get back into the thick of the battle.

Out on the battlefield
Reloading balls at supply depot

Back in action!
| me218bprojectdescription1112.pdf |
