Mechanical Design Overview
In building our robot, we decided to stick to the design principle form follows function. What we needed was a mechanical platform that could fit into a cubic foot box, move around the playing field, shoot at targets and reload five Nerf balls at a time. We determined early on to follow the simple strategy of moving only straight forward or backward, turning 90 degrees, and shooting sideways. In addition, we designed the robot to be modular so that we could prototype and test each module independently.
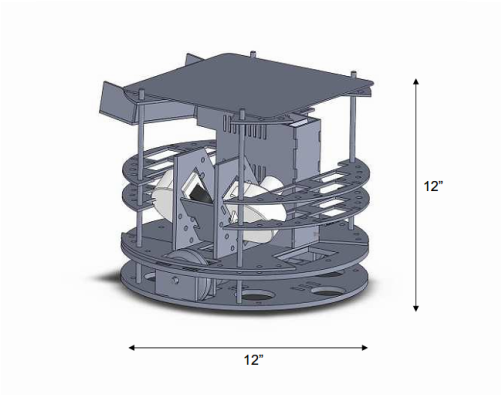
Overall Dimensions
|
|
Size:
Modular Layers:
Sensors and LEDs:
- Diameter 12 inches
- Height 12 inches
Modular Layers:
- Base layer houses motor chassis and batteries
- Launcher/Collector layer houses flying wheel launcher and collector
- Intermediate shelf layers house circuit components
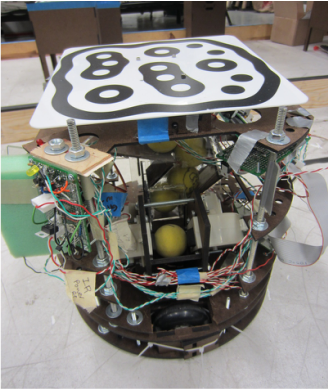
- Top layer houses fiducial and power switch
Sensors and LEDs:
- Phototransistor at a height of 11.5 inches(1x for beacon detection)
- IR emitters at a height of 8 inches (3x for resupply request)
- Yellow LED at a height of 11 inches (1x for resuppply indicator)
- Red LED at a height of 11.5 inches (1x for game on indicator)
SUBSYSTEMS
Base
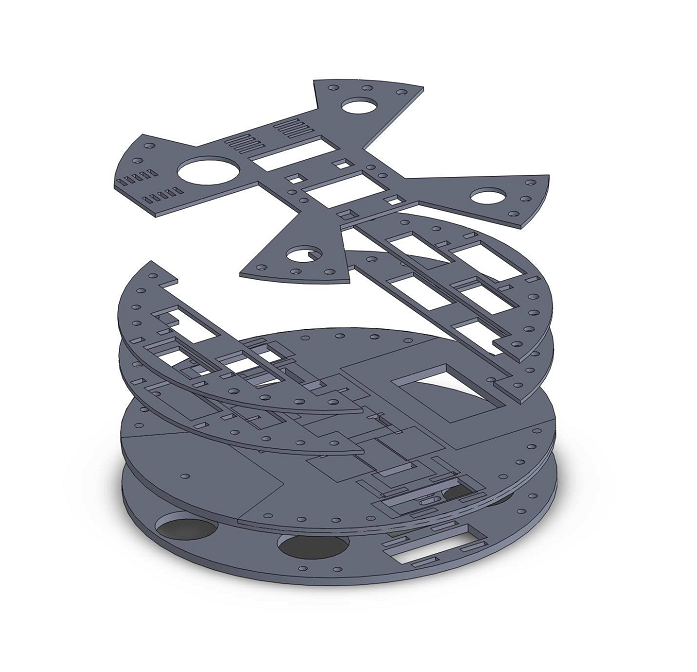
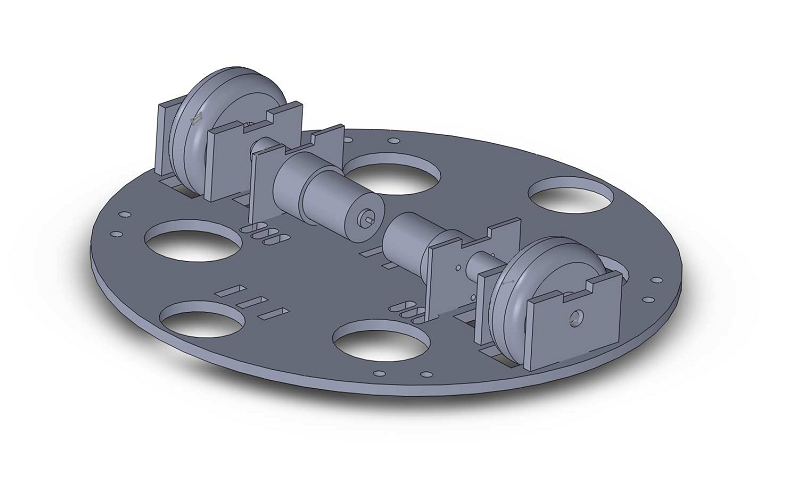
We designed a round base 12" in diameter to avoid being stuck in corners or caught by obstacles while rotating. We chose to work with 1/4" Duron to provide structural support for the base. Two wheels are symmetrically positioned about the center line and two ball castors are attached front and back of the center line in the driving direction. To ensure that both wheels and one ball castor always stay in good contact with the ground, one of the ball castors is slightly raised from ground level. This configuration allows for the robot to rotate in place and drive forward and backward stably.
|
|
Drive Train
We were provided with two motors. For each motor, we used a spider coupler to couple the motor to a D shaft attached to acrylic lasercut pieces fixed to both sides of the wheel's axle. A pair of bushings on either side of the wheel was used to support the load of the D shaft and restrict motion.
|
Close-up of wheels and shft
|
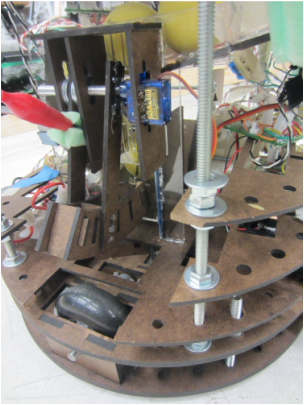
Collector
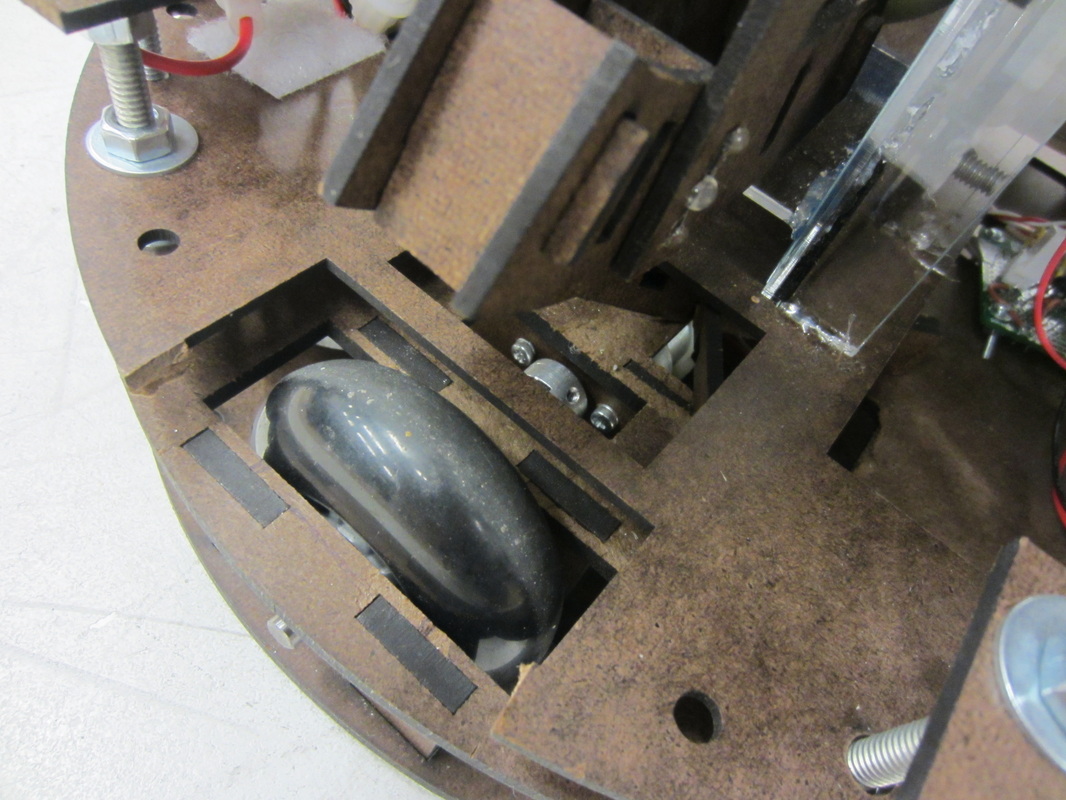
Design specification dictates that our collector should emit IR signals at a height of 8 inches off the ground, receive Nerf balls at a height of 9 inches, and channel the five balls collected to a position where they can be launched by our sideways launcher.
We started out with a rapid prototype made of foamcore to channel balls through a funnel and into a zigzag vertical drop where they would rest in a fixed position on a slope. A servo actuated kicker would push the balls out of the slope and into the launcher one at a time.
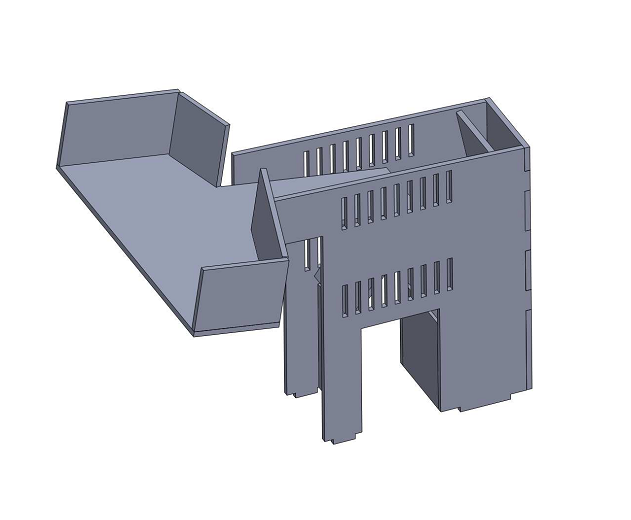
After the proof of concept with our prototype, we created a CAD model in Solidworks and lasercut 1/8" acrylic and Duron to build the collector. We decided to use clear acrylic for the side walls of our collector so we could easily observe where balls were in the collector at any one moment and whether or not they were getting stuck. This made troubleshooting much easier.
We used a 5" wide funnel so that our bot could collect balls at a wide range of positions; it would still be able to receive balls even if it was not perfectly center aligned with the supply depot. To make the collection system more robust, we positioned three different IR emitters on a horizontal span so that any one of the IR emitters could send the signal to request a ball.
We started out with a rapid prototype made of foamcore to channel balls through a funnel and into a zigzag vertical drop where they would rest in a fixed position on a slope. A servo actuated kicker would push the balls out of the slope and into the launcher one at a time.
After the proof of concept with our prototype, we created a CAD model in Solidworks and lasercut 1/8" acrylic and Duron to build the collector. We decided to use clear acrylic for the side walls of our collector so we could easily observe where balls were in the collector at any one moment and whether or not they were getting stuck. This made troubleshooting much easier.
We used a 5" wide funnel so that our bot could collect balls at a wide range of positions; it would still be able to receive balls even if it was not perfectly center aligned with the supply depot. To make the collection system more robust, we positioned three different IR emitters on a horizontal span so that any one of the IR emitters could send the signal to request a ball.
|
Balls in collector
|
Launcher
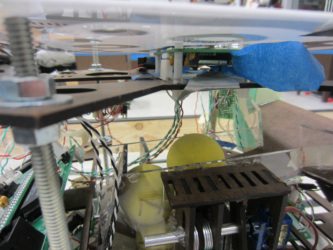
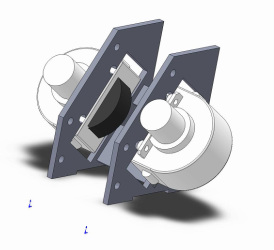
Our launcher design was inspired by tennis ball launchers with flying wheels.
Initially, we prototyped with a pair of motor-driven wheels fixtured to each other with Duron and nuts and bolts at an adjustable distance and angle. Through testing, we narrowed down to a configuration of distances and angles that gave reliable shots. We also tested an open launcher design vs. a launcher with a cannon and decided that the open launcher had better performance in terms of shooting distance and reliability.
In our final launcher design, two wheels were attached to a 1/4" Duron-constructed platform at a fixed distance angled 55 degrees upwards to produce high shots that landed reliably within a square inch of the target area. We tested the launcher at different PWMs and recorded shooting distances each time. We optimized for 3 feet and 5.5 feet, two shooting ranges that would allow us to target any ship on our opponent's field.
Initially, we prototyped with a pair of motor-driven wheels fixtured to each other with Duron and nuts and bolts at an adjustable distance and angle. Through testing, we narrowed down to a configuration of distances and angles that gave reliable shots. We also tested an open launcher design vs. a launcher with a cannon and decided that the open launcher had better performance in terms of shooting distance and reliability.
In our final launcher design, two wheels were attached to a 1/4" Duron-constructed platform at a fixed distance angled 55 degrees upwards to produce high shots that landed reliably within a square inch of the target area. We tested the launcher at different PWMs and recorded shooting distances each time. We optimized for 3 feet and 5.5 feet, two shooting ranges that would allow us to target any ship on our opponent's field.
|
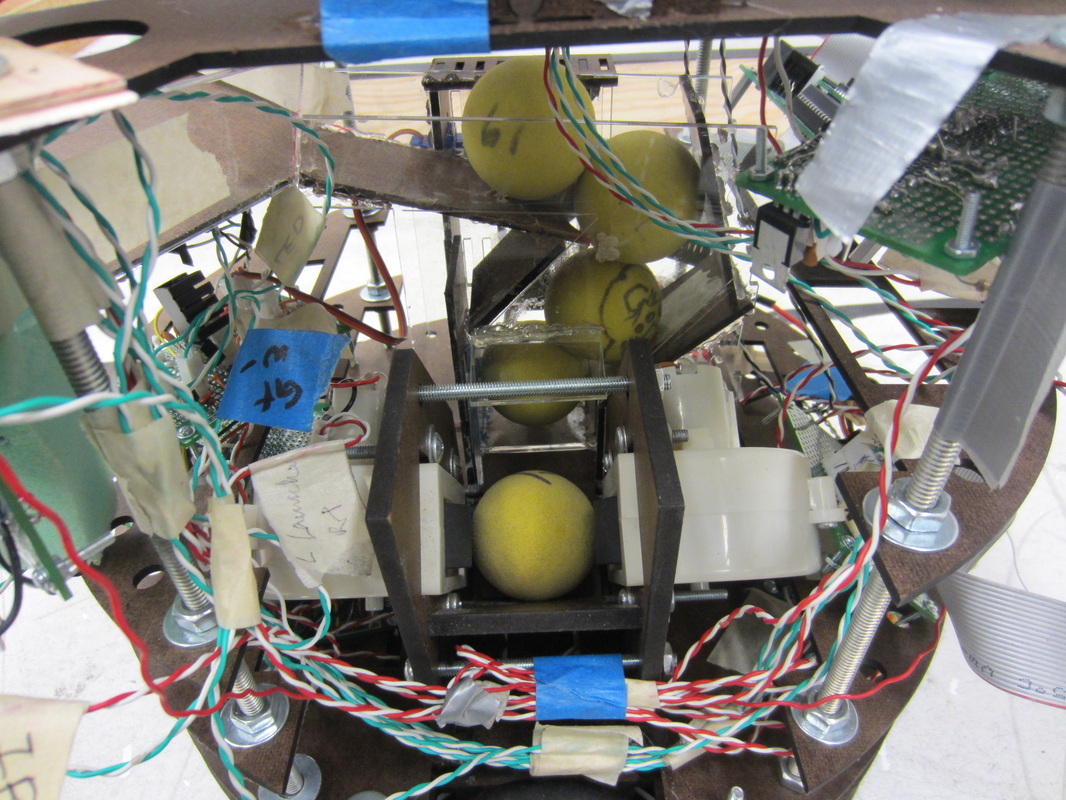
Balls fed to launcher
|
Initial Prototypes
Below are the rough mechanical subsystem prototypes we built to test functionality before constructing them in Duron:
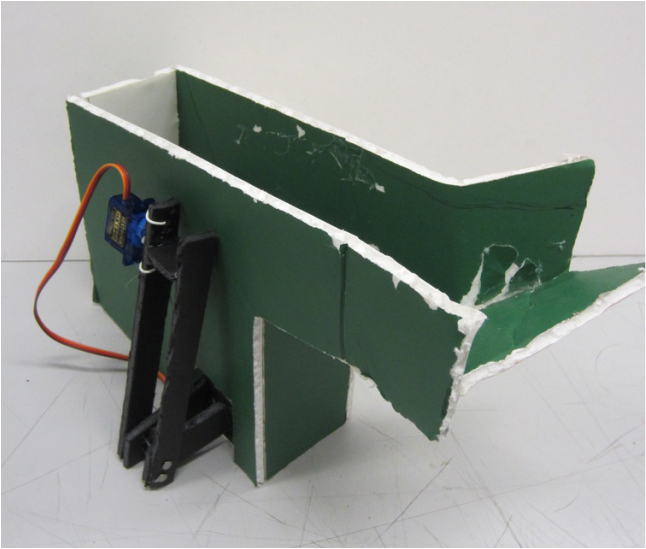
Foam core prototype of ball collector and kicker mounted with servo
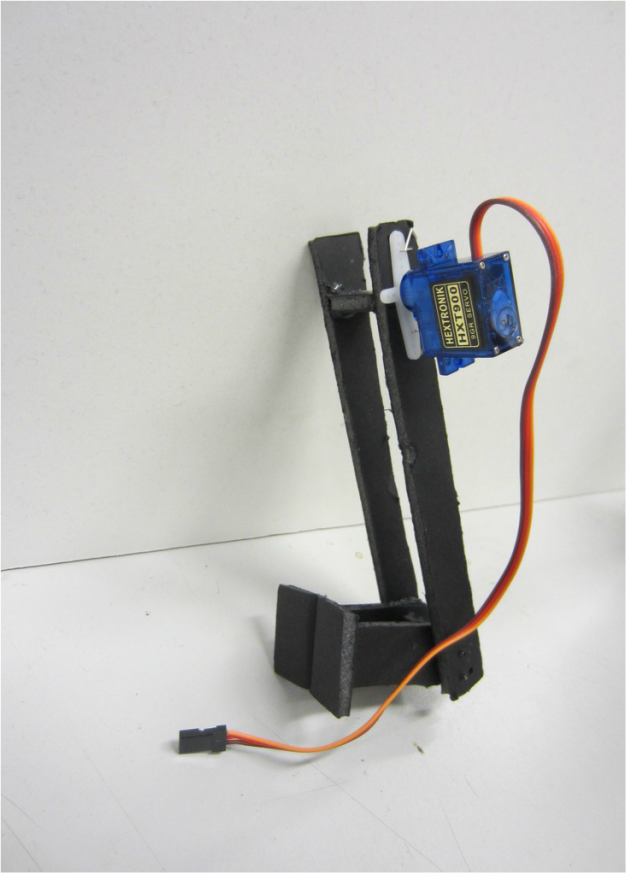
Kicker with servo
